Machina Poliendi Robotica – Superficies Automatice Poliendae Altae Praecisionis





Diagramma Detaliatum
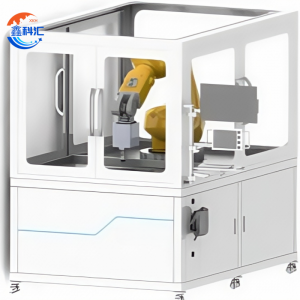

Conspectus Machinae Poliendae Roboticae
Machina Politoria Robotica est systema processandi superficies provectum et plene automatum, ad summos requisitos in fabricatione accurata implendos destinatum. Coniungit imperium roboticum sex axium, technologiam politurae vi reciprocatam, et configurationem duorum capitum ad tractandas amplam varietatem materiarum et geometriarum complexarum cum singulari accuratione et constantia.
Sive ad lentes opticas, sive ad partes aerospatiales, sive ad componentes machinales praecisionis, sive ad usus semiconductorum, haec machina superficies stabiles, repetibiles, et summae qualitatis praebet — etiam ad tolerantias nanometricae.


Compatibilitas Plena Partium Operis Machinae Poliendi Roboticae
Systema tractationem sustinet:
-
Superficies planaepro vitro, ceramica, et laminis metallicis
-
Formae cylindricae et conicaeut cylindri, axes, et tubi
-
Partes sphaericae et asphaericaepro systematibus opticis
-
Superficies formae liberae et extra axemcum curvis et transitionibus complexis
Eius versatilitas id aptum reddit adet productio massalis et fabricatio singularis altae praecisionis.
Proprietates et Beneficia Principalia Machinae Poliendi Roboticae
1. Technologia Capitis Poliendi Duplicis
-
Instructusrotatio singularisetauto-rotatiocapita polienda propter flexibilitatem.
-
Celeris facultas mutationis instrumentorum multiplices modos processus sine longa inopia sustinet.
-
Idoneum ad commutandum inter gradus politurae crassas et subtiles.
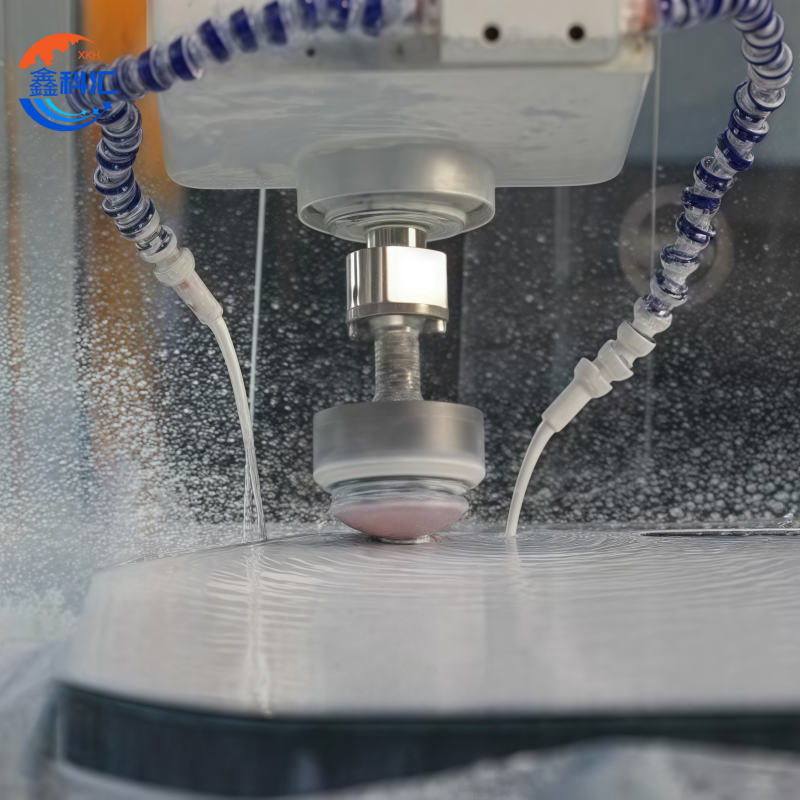
2. Systema Vis-Moderationis Praecisionis
-
Monitorium in tempore realipressio, temperatura, et fluxus fluidi poliendi.
-
Vis constans applicatio aequabilem superficiei perfectionem per totam materiam laborandam praestat.
-
Capax se ad irregularitates superficiei sponte accommodare.
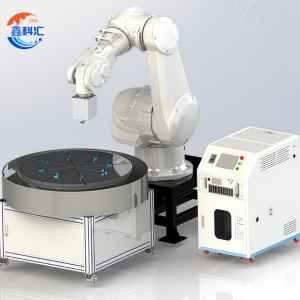
3. Imperium Roboticum Sex-Axium
-
Plena libertas motus ad tractandas geometrias complexas.
-
Cursus motus lenes et accurati per algorithmos provectos calculati.
-
Alta repetitionis accuratio positionis ab ±0.04 mm ad ±0.1 mm secundum exemplar.
4. Automatio et Mensura Callida
-
Instrumenta calibrationis automaticae ad accuratam configurationem et ordinationem.
-
Systema mensurae coordinatarum ad accuratam positionem.
-
Facultativummonitorium crassitudinis interretialead qualitatem in tempore reali moderandam.
5. Qualitas Constructionis Gradus Industrialis
-
Designatio duplicis servomotoris efficacitatem politurae et stabilitatem auget.
-
Structura mechanica rigida vibrationem minuit et diuturnam firmitatem praestat.

Specificationes Technicae Machinae Poliendi Roboticae
| Modellum Instrumenti | Corpus Roboticum | Accuratio Positionis Repetitionis | Diametri Processus Intervallum | Caput Poliendi Rotationis Singularis | Caput Poliendi Multi-Rotationis | Instrumentum Parvum | Politura Typi Rotae Principalis | Politura Capitis Sphaerici | Finis Mutationis Celeris | Instrumentum Calibrationis Automaticae | Caput Mensurae Coordinatarum | Monitorium Crassitudinis Interretiale | Suggestus Moderationis Numericae |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0.04mm / plena amplitudo | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0.05mm / plena amplitudo | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0.05mm / plena amplitudo | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0.06mm / plena amplitudo | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0.1mm / plena amplitudo | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0.1mm / plena amplitudo | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0.1mm / plena amplitudo | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Quaestiones Frequentes – Machina Politoria Robotica
1. Quas species materiarum tractare potest machina politoria robotica?
Machina nostra poliendi robotica varias formas et superficies sustinet, inter quas planas, curvas, sphaericas, formam liberam, et lineamenta complexa. Apta est ad componentes opticos, formas accuratas, superficies metallicas, et alias applicationes poliendi altae praecisionis.
2. Quid interest inter capita poliendi rotationem singularem et rotationem multiplicem?
-
Caput Poliendi Rotationis SingularisInstrumentum circa axem singulum rotatur, ad superficierum polituram normalem et celerem materiae remotionem aptum.
-
Caput Poliendi Multi-RotationisInstrumentum rotationem cum auto-rotatione (orbitatione) coniungit, quo politura aequabilior in superficiebus curvis et irregularibus obtinetur.
3. Quid est diameter maximus processus?
Pro exemplari:
-
Modela compacta (e.g., IRP500S) tractantΦ50–Φ500mm.
-
Modela magnae scalae (e.g., IRP2000AD) usque adΦ2000mm.
De Nobis
XKH in evolutione, productione, et venditione vitri optici specialis et novarum materiarum crystallinarum excellit. Nostra producta electronicis opticis, electronicis domesticis, et militaribus serviunt. Offerimus partes opticas sapphirinas, tegumenta lentium telephonorum mobilium, ceramicas, LT, SIC carburi silicii, quarzum, et crustula crystallina semiconductoria. Cum peritia perita et apparatu modernissimo, excellimus in processu productorum non consuetorum, propensi ad esse societatem technologiae provectiorem in materiis optoelectronicis.

Producta Similia
-

4H-semi HPSI 2inch SiC laganum substratum Producti...
-
Arca quadrata consuetudinaria, arca translationis, fenestra quadrata...
-

Substratum SiC HPSI 6 pollices e lamella carburi silicii...
-

Sapphirum Corundum pro Gemma Al2O3 crystallo ru...
-

Politura substrati aluminii metallici monocrystallini...
-

Lamella Au obducta, lamella sapphirina, lamella silicii...